

流出重油をどこまでも追いかけるロボットブイ (2)
2008年4月18日

- 2/3

接触センサーやカメラ、浮力を駆使して油を自動追跡
──ブイは、重油といっしょに移動するということですが、いったいどういう仕組みになっているのでしょう?
ブイの頭には、ちょうど海面に来るように接触センサーが取り付けられています。この接触センサーを使って、ブイの周囲に油があるかどうかを判定します。接触センサーは常に回転しているローターで、周囲が海水か油かで摩擦が変わってきます。摩擦による抵抗が大きくなれば、電流も上がってきますから、それで油かどうか判定するわけです。
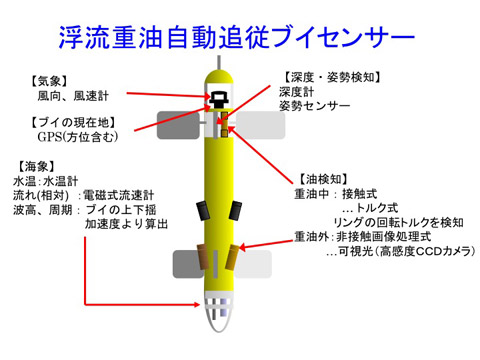
ブイに装備されているセンサー類。
──水か油かを摩擦で判定するというのは面白いアイデアですね。
このセンサーは大阪大学、港湾空港技術研究所、三井造船昭島研究所が共同開発したものです。最初はうまく動作しなかったのですが、螺旋状に筋を入れることできちんと判定できるようになりました。
──ブイが油から外れたら、どうやって油を追従するのでしょう?
周囲に油がないと判断したら、ブイは浮力調整装置を使って自分の浮力を減らし、沈み始めます。5mから10mほど潜ったら、4台の高感度CCDカメラで海面を撮影するのです。油は黒い固まりのように見えるので、重心位置を計算し、そこを目標位置として設定します。
そうしたら今度は浮力を増やして浮上するわけですが、この時に4枚のフィンの角度を調整し、目標位置に向かうのです。
──スクリューで移動するわけではないのですね。
スクリューだと、移動中ずっとエネルギーを消費し続けます。浮力の調整ならば、沈む時と浮き上がる時にモーターを回すだけで済みます。フィンもほとんどエネルギーを使いません。

海面撮影に4台のCCDカメラを搭載している。
──CCDカメラではどれくらいの範囲を撮影できるのですか?
視野は90度なので、10mまで潜る場合は20mの範囲を見られることになります。ブイは水と油の境界を目標にして追跡していきますから、流出した油の周囲に配置しておけば、油が分裂しても付いていくでしょう。そのためには、どれくらいの量の油がどれくらいの面積になるかを計算しておく必要がありますが、このシミュレーションはこれからの課題になります。
──ほかにはどういうセンサーを備えているのでしょう?
頭に付いているセンサーで風速、風向、GPSで自分の現在位置を測定します。海象を測るセンサーとしては水温計、電磁流速計、また加速時計からのデータを元に波高や周期を計算できます。自分の姿勢を測定するための深度計や姿勢検知センサーも備えています。
──バッテリーは何でしょう?
実験機はニッケル水素電池ですが、実用機だと数週間程度は稼働し続けないといけないため、これではとても足りません。頭に太陽電池を付けたり、潮の流れで発電するような仕組みが必要になります。
──地上には無線でデータを送るんですよね。
現在は特定小電力無線を使っていて、通信距離は2~3kmなので、沿岸で使うのであれば大丈夫です。しかし、タンカーに搭載するとなると、通信衛星を使うことになるでしょう。
- 2/3
![]()
![]()
山路達也の「エコ技術研究者に訊く」
プロフィール
![]()
1970年生まれ。雑誌編集者を経て、フリーの編集者・ライターとして独立。ネットカルチャー・IT・環境系解説記事などで活動中。『進化するケータイの科学』、『弾言』(小飼弾氏との共著、アスペクト)、『マグネシウム文明論』(矢部孝教授との共著、PHP新書)など。ブログは、こちら。
過去の記事
- 超低消費電力を実現できるか? 「板バネ」ナノマシンコンピュータ(3)2011年3月24日
- 超低消費電力を実現できるか? 「板バネ」ナノマシンコンピュータ(2)2011年3月24日
- 超低消費電力を実現できるか? 「板バネ」ナノマシンコンピュータ(1)2011年3月24日
- オーランチオキトリウムが、日本を産油国にする(4)2011年2月25日
- オーランチオキトリウムが、日本を産油国にする(3)2011年2月25日